orion provides spatial searching to the euclid ecosystem. It does this through a kd tree that supports both nearest/furthest neighbor as well as range queries.
Installation
You can install the development version of orion like so:
devtools::install_github("thomasp85/orion")Example
A search always start by creating a kd tree, which can be created from 2D and 3D points. You can provide a range of different strategies for how it should be created but here we are just using the defaults.
library(euclid)
#>
#> Attaching package: 'euclid'
#> The following object is masked from 'package:stats':
#>
#> line
#> The following object is masked from 'package:base':
#>
#> union
library(orion)
pts <- point(runif(100), runif(100))
tree <- kd_tree(pts)
tree
#> <2D kd tree [100]>
#> Tree constructed using the sliding midpoint strategy
#> - bucket size: 10Now you can use this tree for various queries. All of these are vectorised on the queries so the same tree can be queried efficiently multiple times.
Below is shown a standard nearest neighbor search for the 10 closest neighbors to the input:
pt <- point(0.4, 0.7)
neighbors <- kd_tree_search(pt, tree, n = 10)
plot(pts, cex = 1)
euclid_plot(neighbors$points, cex = 0.6, pch = 16, col = 'firebrick')
euclid_plot(pt, cex = 1, pch = 16, col = 'forestgreen')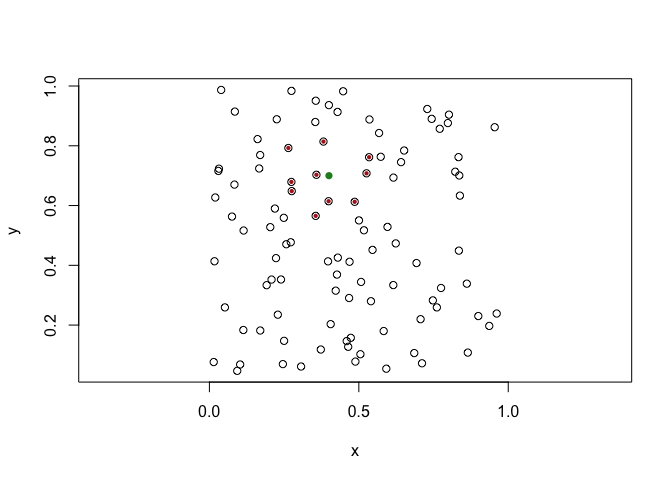
You can also do range queries (ie. return all points inside a geometry):
circ <- circle(pt, 0.04)
inside <- kd_tree_range(circ, tree)
plot(pts, cex = 1)
euclid_plot(inside$points, cex = 0.6, pch = 16, col = 'firebrick')
euclid_plot(circ, fg = 'forestgreen')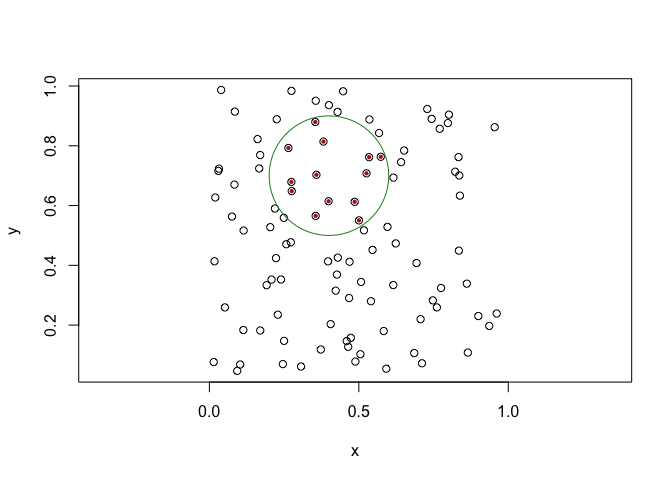
This is the basics — it is a very focused package. There is a bit more to it but this should be obvious from the docs.
Benchmark
The advantages of using a kd tree over a naive approach.
naive_search <- function(query, points, n) {
d <- distance_squared(query, points)
points[order(d)[seq_len(n)]]
}
lookup <- point(runif(1e4), runif(1e4))
query <- point(0.5, 0.5)
tree <- kd_tree(lookup)
bench::mark(
naive = naive_search(query, lookup, 10),
kd_tree_precomputed = kd_tree_search(query, tree, 10),
kd_tree_tree_build = kd_tree_search(query, kd_tree(lookup), 10),
iterations = 100,
check = FALSE
)
#> # A tibble: 3 × 6
#> expression min median `itr/sec` mem_alloc `gc/sec`
#> <bch:expr> <bch:tm> <bch:tm> <dbl> <bch:byt> <dbl>
#> 1 naive 2.04ms 2.11ms 448. 114KB 0
#> 2 kd_tree_precomputed 99.47µs 103.98µs 9496. 0B 95.9
#> 3 kd_tree_tree_build 28.24ms 28.59ms 34.9 0B 0We can see that the construction of the tree makes the kd tree based search slower than a single naive search, but a tree can be reused for multiple queries making it a good approach for most practical applications
Code of Conduct
Please note that the orion project is released with a Contributor Code of Conduct. By contributing to this project, you agree to abide by its terms.